TL;DR
- This blog is for engineering students, freshers, and EV enthusiasts who want to understand how speed control of PMSM motors works and why it is central to modern electric vehicles and industrial drives.
- A Permanent Magnet Synchronous Motor (PMSM) does not control its own speed automatically; it needs an intelligent controller to regulate how fast it spins, depending on load and application demands.
- The three most commonly discussed speed control techniques for PMSM motors are Scalar Control (V/Hz), Field-Oriented Control (FOC), and Direct Torque Control (DTC), each suited to different performance and precision requirements.
- Field-Oriented Control (FOC) is industry gold standard for PMSM motor controllers in electric vehicles because it delivers high efficiency, smooth torque, and precise speed tracking across a wide operating range.
- India’s booming EV sector from e-rickshaws to premium four-wheelers is driving massive demand for engineers who understand PMSM motor control, making this one of most career-relevant topics in electrical and electronics engineering today.
Electric vehicles were once considered a distant future. Today, they are parked outside engineering colleges, running on Indian highways, and being manufactured in cities like Pune, Chennai, and Bengaluru. At the heart of nearly every modern EV sits a Permanent Magnet Synchronous Motor and behind that motor sits a sophisticated speed control system that makes smooth acceleration, efficient cruising, and controlled braking possible.
If you are studying electrical engineering, power electronics, or mechatronics, understanding speed control of PMSM motors is not just an academic exercise. It is a foundational skill that connects directly to one of the fastest-growing industries in the world.
This blog breaks down everything you need to know from what a PMSM is, to how different control methods work, to where India stands in this technology landscape and what opportunities await you as an engineering graduate.
Also Read,
- Working Principle of Electric Vehicle Explained Guide
- Lead Acid vs Lithium Ion Battery
- Components of Electric Vehicle: A Beginner’s Complete Guide
What Is a PMSM Motor and Why Does It Need Speed Control?
Before you can understand speed control, you need to understand what makes a PMSM different from a regular motor and why controlling its speed is not as straightforward as it might seem.
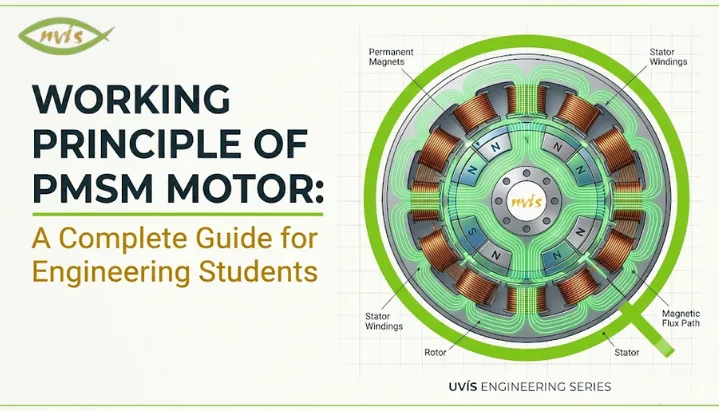
A Permanent Magnet Synchronous Motor has two key parts: a stator (stationary outer section) and a rotor (spinning inner section). The rotor is fitted with permanent magnets instead of electromagnets or copper windings. When alternating current flows through stator windings, it creates a rotating magnetic field. The rotor’s permanent magnets lock on to this rotating field and spin along with it which is why it is called a “synchronous” motor. The rotor always spins at the same speed as the rotating magnetic field, no more, no less.
Now here is a problem. If the rotor spins in perfect sync with the supply frequency, how do you change its speed? short answer: by changing frequency and magnitude of AC supply fed to stator. But doing this in a way that keeps the motor efficient, stable, and responsive across different loads is the entire challenge of PMSM speed control.
A PMSM does not self-regulate.Without an appropriate control system, a PMSM cannot reliably maintain desired speed and torque under changing operating conditions and may lose synchronism under varying loads. The PMSM motor controller is a brain that constantly monitors what motor is doing and adjusts electrical input to keep speed and torque exactly where you need them.
Think of it like cruise control in a car. The driver sets a speed, and the system continuously adjusts fuel delivery to maintain that speed whether the road is flat or uphill. A PMSM controller does the same thing for a motor except it works thousands of times per second.
What Is a PMSM Motor? Key Characteristics That Make It Special
PMSM stands apart from induction motors and DC motors for reasons that directly matter to real-world performance.
High Power Density: A PMSM produces more power per kilogram of motor weight compared to most other motor types. For electric vehicles where every gram of weight affects range, this is a critical advantage.
High Efficiency: PMSM efficiencies typically range between 92% and 97%, making them an excellent choice for EV applications where battery energy must be used as judiciously as possible.
Wide Speed Range: PMSM motors maintain high efficiency across a broad range of operating speeds from near-zero to well above rated speed. This suits EV driving profiles, which constantly shift between slow traffic, highway cruising, and regenerative braking.
Torque at Low or Zero Speed: With an appropriate controller such as FOC, a PMSM can produce rated torque at standstill or very low speeds. This makes it suitable for applications requiring smooth startup and precise control.
Low Maintenance: With no brushes or slip rings, PMSM motors have fewer mechanical parts that wear out. This reduces long-term maintenance costs, which is important for commercial EV fleet operators.
These characteristics explain why manufacturers like Tesla (Model 3), BYD, and Indian EV companies increasingly favor PMSM motors in their drivetrains. Tesla Model 3 uses a PMSM-based drive system that combines high efficiency, compact packaging, and advanced motor control strategies to achieve strong performance and long driving range.
Three Core Methods of Speed Control of PMSM Motor
Not all PMSM applications need the same level of precision. A simple conveyor belt has very different requirements from a high-performance EV drivetrain. This is why engineers have developed multiple speed control strategies, each with its own trade-offs between simplicity, performance, and cost.
1. Scalar Control (V/Hz Control) Simple Starting Point
Scalar control is primarily used with induction motors. Although it can be applied to PMSMs in certain low-performance applications, it is generally unsuitable for high-efficiency PMSM operation because PMSMs require accurate rotor position synchronization and torque control, PMSMs generally require more advanced control techniques such as FOC for stable and efficient operation. The basic idea is simple: since rotor speed depends on frequency of AC supply, you change speed by changing supply frequency. To prevent the motor from losing too much magnetic flux (which would reduce torque), you also scale voltage proportionally hence the name V/Hz (Volts per Hertz) control.
Imagine turning up a fan speed by simply increasing voltage and frequency of power supply. That is essentially what scalar control does. It is easy to implement, inexpensive, and works well in applications where load remains relatively constant and precision is not critical such as basic pumps, fans, and simple conveyor systems.
However, scalar control has significant limitations for PMSM motors in demanding applications. It cannot independently control torque and flux. It responds slowly to sudden load changes. It does not use real-time feedback from the motor, meaning it operates essentially blind. For EV applications, where load conditions change every fraction of a second, scalar control is simply not good enough.
2. Field-Oriented Control (FOC) Industry Standard for PMSM Controllers
Field-Oriented Control, often called FOC or vector control, is a technique that transformed PMSM motor control from a complex academic challenge into a practical engineering solution. Understanding FOC is essential for anyone working with PMSM motor controllers in modern systems.
Here is core intuition. A DC motor is easy to control because its magnetic flux and torque are produced by separate, independent current paths. You can increase torque without disturbing flux, and vice versa. An AC motor like a PMSM does not naturally work this way; all three phase currents interact with each other in a rotating reference frame, making independent control of torque and flux seemingly impossible.
FOC solves this by using mathematical transformations, specifically Clarke and Park transformations to look at motor’s rotating currents from a different reference frame. By transforming three-phase currents into two orthogonal components called d-axis current (flux-producing) and q-axis current (torque-producing), FOC effectively turns a complex three-phase AC motor into something that behaves like a simple DC motor. Torque and flux can now be controlled independently, in real time, with high precision.
Clarke transformation converts three-phase (a, b, c) quantities into a two-phase stationary reference frame. Park transformation then converts those into a rotating d-q reference frame aligned with the rotor. Once in the d-q frame, two simple PI (Proportional-Integral) controllers handle rest. After computing required voltages, an inverse Park and Clarke transformation converts everything back to three-phase signals, which then drive the motor through a PWM inverter.
FOC ensures optimal speed and torque control even at very low speeds something scalar control cannot achieve. It automatically compensates for changes in motor load, speed, or operating direction. And it does all of this while keeping efficiency as high as possible, a critical requirement for a PMSM motor for EV applications where every watt matters.
For EV applications specifically, FOC research conducted using Indian Drive Cycle (IDC) a speed-time profile simulating real Indian traffic conditions has confirmed that FOC-based PMSM control delivers superior performance for vehicles like e-rickshaws and electric scooters. Indian researchers at institutions including NIT Meghalaya and Rajiv Gandhi Institute of Technology, Kottayam, have published significant work on this exact application.
| Parameter | Scalar Control | Field-Oriented Control (FOC) |
| Torque-Flux Decoupling | No | Yes |
| Dynamic Response | Slow | Fast |
| Low-Speed Performance | Poor | Excellent |
| Complexity | Low | Medium-High |
| EV Suitability | No | Yes |
| Cost of Implementation | Low | Medium |
3. Direct Torque Control (DTC) Speed Through Torque
Direct Torque Control takes a different approach to speed control of PMSM motors. Instead of controlling speed by regulating currents through a rotating reference frame like FOC does, DTC controls speed by directly and continuously selecting an inverter switching state that produces the closest match to desired torque and flux.
DTC is faster in torque response than FOC and does not require complex coordinate transformations. However, it tends to produce more torque ripple slight fluctuations in torque output that can cause vibration and noise. For applications like high-precision servo drives or very smooth EV driving experiences, this ripple is a disadvantage. Modern DTC implementations use improved switching strategies to reduce ripple, but FOC remains the dominant choice for PMSM-based EV drivetrains.
How a PMSM Motor Controller Actually Works
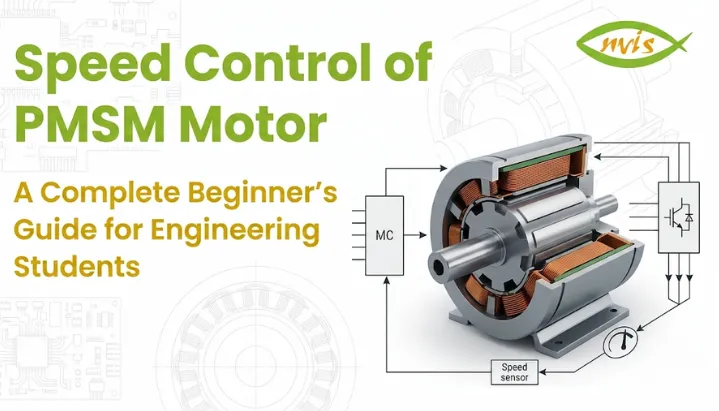
Now that you understand speed control methods, let us trace how a complete PMSM motor controller functions in a real system step by step.
Step 1 Speed Reference Input: driver (or automated system) provides a desired speed. In an EV, this comes from the accelerator pedal position sensor.
Step 2 Speed Measurement: A sensor typically an encoder, resolver, or Hall effect sensor measures actual rotor speed and position in real time.
Step 3 Speed Error Calculation: controller compares desired speed to actual speed. The difference is called speed error.
Step 4 Torque Reference Generation: A PI controller uses speed error to calculate how much torque motor needs to generate to close that gap.
Step 5 Current Control (FOC Specific): torque reference is converted into d-axis and q-axis current references. Inner current control loops then adjust stator voltages to drive actual currents toward these references.
Step 6 PWM Signal Generation: computed voltage references are used to generate Pulse Width Modulation (PWM) signals. These signals switch inverter’s power transistors (typically IGBTs or MOSFETs) at high frequency to produce required voltage waveform.
Step 7 Motor Response: motor receives controlled three-phase voltage and current, producing right amount of torque to achieve and maintain target speed.
This entire loop runs thousands of times per second. The outer speed loop typically runs at a lower sampling rate (say, 1 kHz), while the inner current control loop runs much faster (often 10 kHz or higher). This cascaded structure ensures both speed stability and fast dynamic torque response.
PMSM Motor for EV: Why It Is Motor of Choice in Electric Vehicles
A PMSM motor for EV applications is not an arbitrary choice. It is the product of decades of research into what motor technology best matches demanding requirements of vehicle propulsion.
An electric vehicle motor must produce high torque at low speeds for acceleration from standstill, maintain high efficiency across a wide speed range during normal driving, handle regenerative braking smoothly, fit compactly within a vehicle chassis, and survive years of thermal and mechanical stress. PMSM ticks every one of these boxes.
In the constant-torque region, where the motor operates below its rated speed, FOC typically increases q-axis current (the torque-producing component) while maintaining an optimal d-axis current reference, enabling Maximum Torque Per Ampere (MTPA) operation and high efficiency.
In a constant power region when the motor exceeds its rated speed a technique called field weakening is applied. Here, a negative d-axis current is introduced to reduce effective magnetic flux, allowing the motor to spin faster than its base speed without violating voltage or current limits. This is analogous to shifting gears in a conventional car where you trade torque for speed.
Regenerative braking is another area where PMSM and FOC shine together. When the driver decelerates, the motor switches to generator mode, converting kinetic energy back into electrical energy that recharges the battery. FOC manages this transition seamlessly, without jerks or instability.
Indian EV manufacturers and research institutions have taken notice. FOC-based PMSM control systems have been validated for e-rickshaw applications under Indian Drive Cycle accounting for India’s specific driving conditions including stop-and-go traffic, low speeds, and frequent load changes from passenger numbers. Companies operating in India’s EV ecosystem, from Tata Motors and Ola Electric to smaller EV startups, are building drivetrain systems around PMSM motor controllers that implement exactly these principles.
Various market studies project strong growth for India’s EV sector through the coming decade, driven by policy support, rising consumer adoption, and investments in manufacturing, represents one of fastest-growing technology markets in Asia. The government’s target of 30% EV penetration by 2030 means motor control engineering is no longer a niche academic specialization, it is a mainstream career track.
Sensorless Speed Control: Next Frontier
Traditional PMSM controllers rely on physical sensors, encoders or resolvers to measure rotor speed and position. These sensors add cost, increase system complexity, and can fail in harsh industrial or automotive environments. Sensorless control eliminates this dependency by estimating rotor position mathematically from measurable quantities like back-EMF (voltage generated by spinning rotor itself) and motor current signatures.
Sensorless control techniques are typically divided into two operational categories. In the medium-to-high speed range, machine model-based methods often estimate rotor position using back-EMF and observer-based techniques, machine model-based methods use mathematical observers like Model Reference Adaptive System (MRAS) to estimate rotor position from back-EMF. At very low speeds (below 10% of base speed), signal injection methods are used instead, since back-EMF is too small to measure reliably.
For EV applications, sensorless control is particularly attractive because it reduces hardware cost, eliminates a potential failure point, and simplifies mechanical assembly. However, sensorless algorithms must be robust enough to handle dynamic, unpredictable conditions of real-world driving. This remains an active area of research, with Indian institutions contributing meaningfully through publications in IEEE and other international journals.
Career Opportunities in PMSM Motor Control for Engineering Students in India
If you are an engineering student reading this, here is a practical question you are probably asking: what does understanding PMSM speed control actually do for my career?
The answer is more direct than you might expect.
The electric vehicle industry in India is creating thousands of engineering roles across motor design, power electronics, embedded systems, and control algorithm development. Companies like Tata Motors, Ola Electric, Ather Energy, Bajaj Auto, and numerous EV startups are actively hiring engineers who understand motor control fundamentals.
A solid grasp of PMSM speed control techniques particularly FOC implementation is directly applicable to roles in EV drivetrain engineering, motor controller firmware development, power electronics design, simulation and validation using MATLAB/Simulink, and embedded control systems development using platforms like TI’s C2000 microcontrollers or NXP’s motor control DSPs.
Beyond EVs, PMSM motor controllers are used in industrial servo drives, CNC machine tools, wind power generation systems, aerospace actuators, and robotics. skill transfers across sectors. Engineers who can simulate a FOC algorithm in MATLAB, understand dq-axis transformations, and validate results against real hardware are genuinely valuable in today’s market.
For structured learning, students can explore EV engineering certification programs, online motor-control courses, and industry training platforms covering PMSM control, power electronics, and EV drivetrain systems in EV engineering that cover PMSM field-oriented control, motor controller design, and drivetrain integration with recognition by NEAT AICTE and ASDC. Your university electrical machines and power electronics labs, if equipped with PMSM training systems, are also an excellent place to start hands-on experimentation with V/Hz and FOC speed control techniques.
Conclusion
Speed control of the PMSM motor is one of the most consequential areas of modern electrical engineering. It is technology that determines how smoothly your electric scooter accelerates, how efficiently a factory robot positions itself, and how far an EV can travel on a single charge.
From simple logic of scalar V/Hz control to mathematical elegance of Field-Oriented Control, each technique represents a different answer to the same fundamental challenge: making a synchronous motor respond intelligently to changing demands. FOC, with its ability to independently control torque and flux, has become the dominant solution for PMSM motor controllers in electric vehicles precisely because it delivers high performance without sacrificing efficiency.
India’s EV revolution makes this knowledge timely and career-relevant. As the country moves toward 30% EV penetration by 2030, demand for engineers who can design, simulate, and validate PMSM control systems will only grow. Understanding these concepts now before you step into your first job gives you a genuine edge.
If you are an engineering student, start with basics: understand the dq-axis model, simulate a simple FOC loop in MATLAB or Simulink, and experiment with a PMSM training kit if your college has one. Concepts may seem abstract at first, but every hour you invest in understanding PMSM speed control today translates directly into engineering skills that India’s EV industry needs tomorrow.
Frequently Asked Questions (FAQs)
The speed of a PMSM depends on the frequency of AC supply to its stator. By varying this frequency using a power inverter and a control algorithm, the motor’s speed can be precisely regulated. The PMSM motor controller continuously measures actual speed, compares it to desired speed, and adjusts stator voltage and frequency to correct any deviation.
FOC separates torque-producing and flux-producing components of stator current, allowing each to be controlled independently. This enables high efficiency, fast torque response, smooth operation at low speeds, and seamless regenerative braking all of which are critical requirements for PMSM motors for EV drivetrains. Scalar control cannot meet these performance demands, and DTC, while fast, produces more torque ripple.
Both use permanent magnet rotors, but they differ in their back-EMF waveforms and how they are controlled. A PMSM produces a sinusoidal back-EMF and is driven with sinusoidal currents (typically via FOC), resulting in smoother torque. A BLDC motor produces a trapezoidal back-EMF and is driven with square-wave currents in a six-step commutation pattern, which is simpler but produces more torque ripple. For premium EVs where ride quality and efficiency matter, PMSM with FOC is generally preferred choice.
Sensored controllers use encoders, resolvers, or Hall effect sensors to measure rotor position and speed. Sensorless controllers use mathematical algorithms to estimate rotor position from motor voltage and current measurements, eliminating need for physical position sensors. Sensorless methods reduce cost and improve reliability but are more complex to implement, especially at very low speeds.
In FOC-based PMSM control, speed and torque control are cascaded. The outer speed control loop compares desired speed to actual speed and generates a torque reference. inner torque control loop then adjusts stator currents to produce exactly that torque. This cascaded structure allows both precise speed tracking and fast torque response, which is why PMSM motor controllers in EVs can feel both smooth and responsive simultaneously.
Students with a strong foundation in PMSM speed control can pursue careers in EV drivetrain engineering, power electronics design, embedded motor control firmware development, simulation and testing using MATLAB/Simulink, and industrial servo drive development. In India, companies like Tata Motors, Ola Electric, Ather Energy, and various EV startups are hiring engineers with exactly these skills, and demand is expected to grow significantly as India targets 30% EV penetration by 2030.